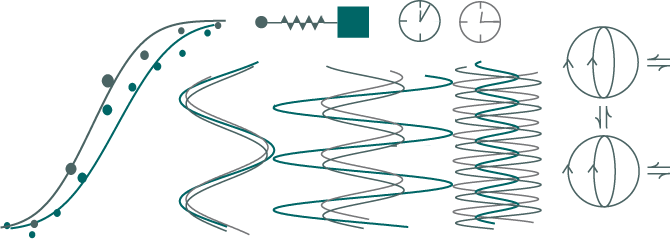
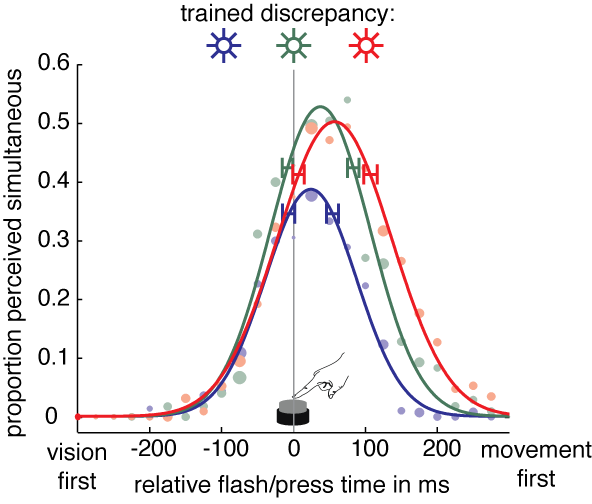
  Examples of delayed tracking behavior (top) and recalibration of perceived visuomotor simultaneity (bottom)
Examples of delayed tracking behavior (top) and recalibration of perceived visuomotor simultaneity (bottom)
|
Sensorimotor delay adaptation
Humans adapt both the behavior and time perception to compensate for modified feedback delays. What are the behavioral strategies to deal with delays? How exactly does this reshape our perceived sensorimotor timing? Does delay adaptation transfer between senses and body parts? |
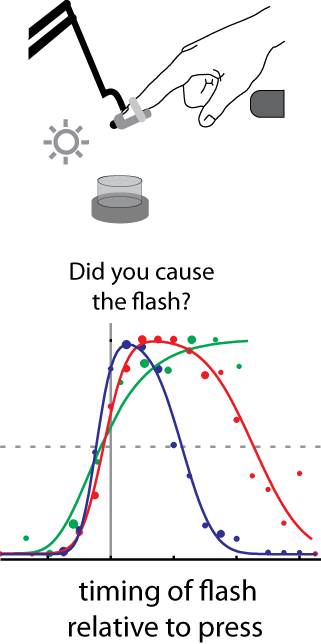 The temporal window of perceived agency (red) |
Temporal processing, prediction and agency
Temporal coherence between and temporal order of visual and motor/kinesthetic signals influences the sense of agency. How is agency perceptually inferred? On the other hand, we make predictions about the sensory consequences of our actions, which influence our sensory processing. How do our intentional actions influence the perception of stimulus timing and intensity? |
|
The automated stroking setup used in my experiments |
Body perception
|
|
Example of robotic goal-babbling |
Motor skill acquisition
|
|
Example evolved behavior |
The perception of other agency in interaction
Minimal Turing test scenarios. What is it about a dynamical interaction with another person that makes me perceive the other
as an intentional agent? |
Embodied cognition and computational modeling
Many apparent scientific problems or difficulties can be resolved by taking a step back and looking at the bigger picture to question the assumptions underlying one's research and consider non-obvious alternatives. This includes confusions between the mechanistic and functional levels of description, general lack of clarity about assumptions underlying a scientific investigation and a blind splot for dynamical and embodied/situated processes in perception, cognition and behavior.
|
|
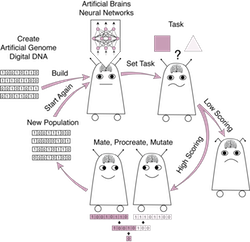 |
Evolutionary Robotics
Evolutionary Robotics is a method for the automatic generation of robots or robot controllers that optimize behavior according to a certain criteraion. Neural network control parameters are initialized randomly and then optimized in closed-loop interaction interaction with the environment. This underspecification of the cognitive architecture leads to surprising, counter-intuitive and dynamically non-linear solutions that might be a nightmare to the human engineer, but plausible as naturally evolved solutions. |
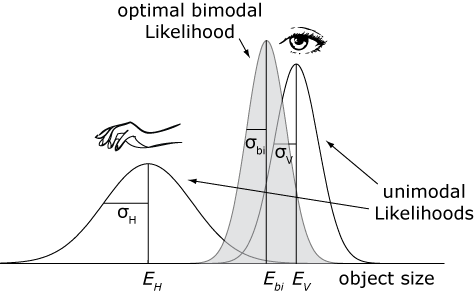 |
Bayesian approaches
In the early 2000s and 2010s, researchers in Cognitive and Perception Science realized that human performance in many tasks can be explained by statistically optimal models of optimal Bayesian inference. It has been shown time and again that we learn and use information about signal uncertainty and prior probabilities when performing inference for perception, action and cognition. Yet, the powerful Bayesian framework also holds a number of hazards if used incorrectly. For instance, when researchers take on board too many assumptions that cannot be easily justified, Bayesian modeling can turn into a curve-fitting exercise rather than a benchmark for human performance. Therefore, I promote the rigorous use of these methods. |


If not specified otherwise, page and contents are licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. Webpage maintenance and development: Marieke Rohde.